Skip to content
Home
Contact
CV
Publications
Keyan Ghazi-Zahedi
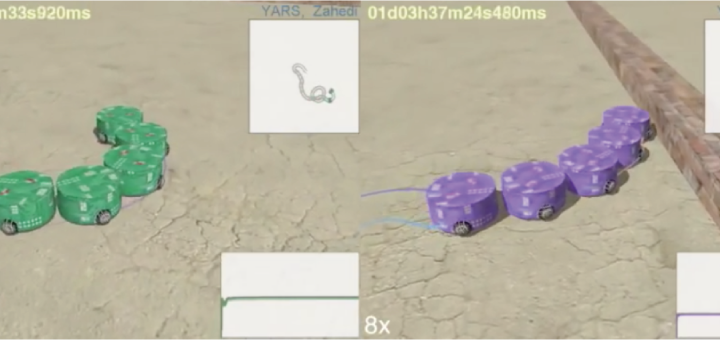
Higher Coordination with Less Control
March 16, 2017
January 17, 2025
zahedi